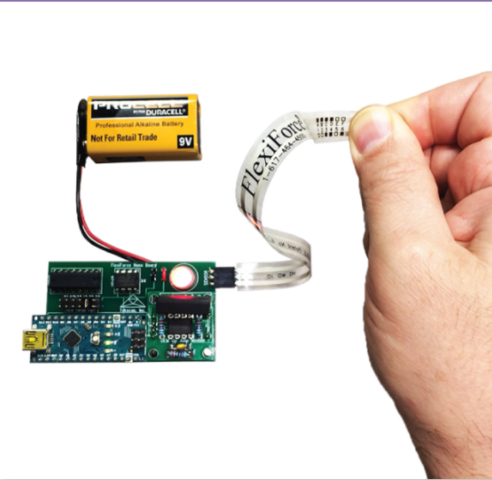
Grâce à la linéarité du circuit choisi lors de la phase de caractérisation du capteur et aux ajustements apportés lors de la phase de validation du concept, les concepteurs ont mis au point une procédure d'étalonnage simple en deux points à l'aide du kit de prototypage FlexiForce. En réalité, l'équipe est retournée au dispositif de chargement du kit de caractérisation FlexiForce pour appliquer des charges connues au capteur et aux matériaux d'interface choisis pour l'étalonnage.
À partir de là, ils ont pu tester le fonctionnement du capteur en faisant couler un fluide dans le tube et en surveillant le retour d'information sur un écran de contrôle. Le capteur ayant été caractérisé et le concept démontré avec la même configuration de circuits et de matériaux au cours des phases précédentes, l'équipe a été en mesure de résoudre tout problème de performance imprévu grâce à ses données de référence.
Une fois satisfaite des performances du capteur dans le prototype Alpha, un prototype Beta a été fabriqué par l'équipe en utilisant le même boîtier et le même tube, ainsi que le reste des composants IHM prévus au projet (écran numérique, cadrans, boutons, etc.). Cette version du prototype incorporait la première version de la carte de circuit imprimé (PCB). Pour concevoir l'interfacage du capteur, l'équipe a pu utiliser les schémas de circuit analogique mis à leur disposition ce qui lui a permis d'intégrer avec certitude le même circuit sur son PCB.