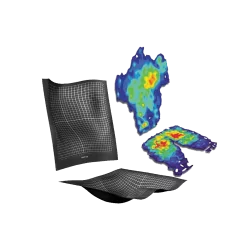



Capteurs
Le système Grip™ utilise un capteur fin à haute résolution utilisable directement sur la main ou intégré à un gant. Chaque capteur offre dix-huit zones de mesure. Ces surfaces peuvent être positionnées individuellement sur une section anatomique d'intérêt sur les doigts et sur la paume. La séparation des zones sensibles permet d'éviter les articulations et de bouger librement sans interférer dans la mesure de préhension. Chaque zone est dotée de plusieurs éléments de mesure permettant de localiser finement les points de pression sur la main.
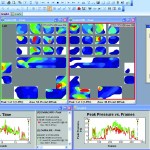
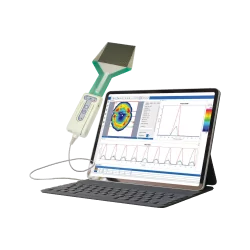
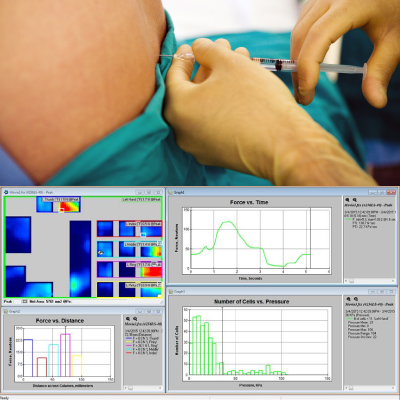
Logiciel
Données temps-réel ou post-traitement en 2D &3D ; Indicateurs clés (force totale, pic de pression et centre de force) ; Tracés graphiques des données ; Visualisations et comparaisons multiples simultanées ; Association d'une image numérique à chaque image de la séquence ; Export des données en ASCII ou AVI
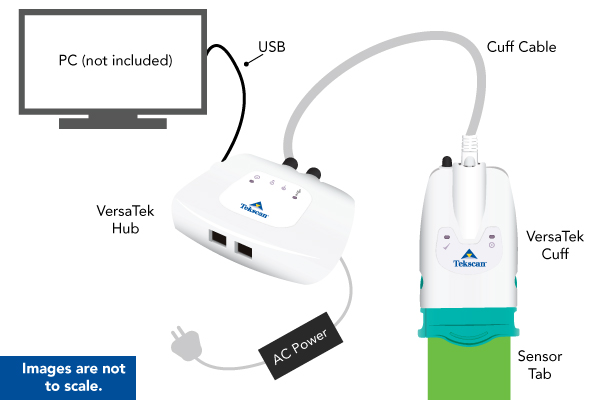
VersaTek™ Tethered
Des câbles relient chaque capteur et son électronique de numérisation portés par le sujet, à l'ordinateur via un port USB. Les événements dynamiques sont enregistrés avec une fréquence pouvant atteindre 750 Hz.
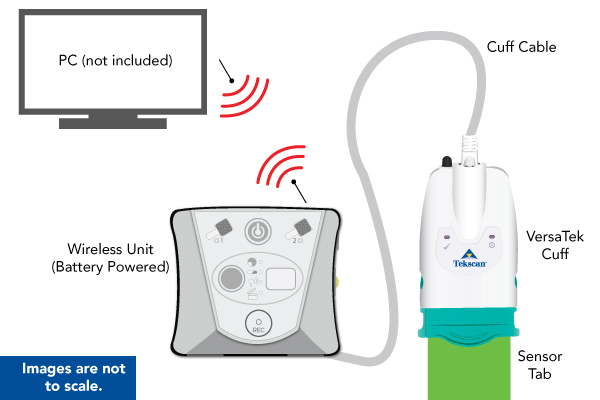
Wireless VersaTek™
Les données sont transmises directement du sujet à l'ordinateur ce qui permet un large éventail d'applications. Le sujet pouvant se trouver jusqu'à 30 m de distance, les mesures sont enregistrées et affichées sur l'ordinateur en temps réel. Une vitesse de scan de 100 Hz peut être obtenue avec la connectivité sans fil.
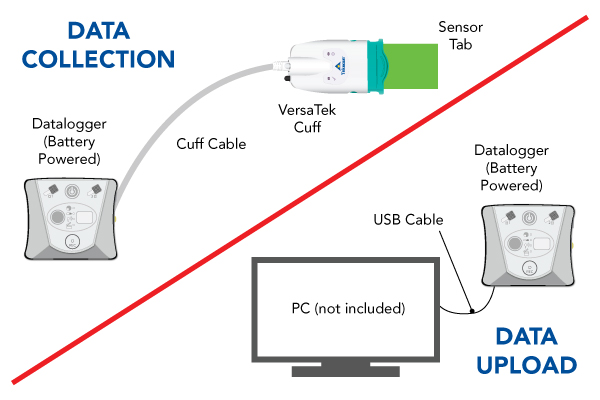
VersaTek™ Datalogger
Les mesures sont collectées et stockées dans la mémoire interne de l'appareil pour être téléchargées ultérieurement sur un ordinateur. Le sujet peut se déplacer à grande distance de l'ordinateur et l'enregistrement peut se faire sur une longue période de temps. La fréquence d'échantillonnage peut être configurée jusqu'à 750 Hz .